工作機械内を画像でリアルタイムモニタリング - 異常検知


機内で見逃していた物が見える
工作機械内を画像でリアルタイムモニタリング - 異常検知
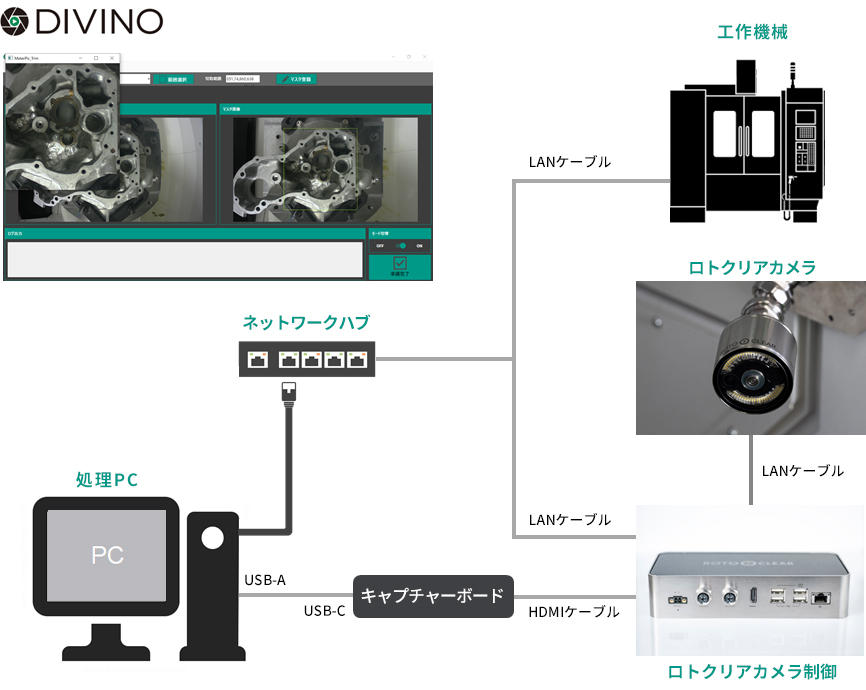
DIVINOは工作機械と連動し、自動で機内の録画を開始、ワーク形状の判定をします。
一般的な機内カメラは内部を人が見るだけですが、DIVINOは工作機械と通信して自動化のサポートをするシステムです。
加工プログラムが開始されると録画が開始され、加工が終了すると録画も終了します。
録画の保存はコマ数とコマ当たりの録画時間で設定します。
コマ数設定 :1コマ~99コマ
録画時間設定 :1分~10分
例) 1コマ1分、5コマで設定すると ⇒ 1分x 5コマで常に5分の動画が保存されます。
(1コマ増えるごとに上書きされます)
工作機械のNCアラーム、非常停止、プログラム上で作成したアラーム等が発生した場合、録画は自動的に停止します。
従いまして、アラームが発生した瞬間の動画が記録されるためアラームの原因究明が楽になります。
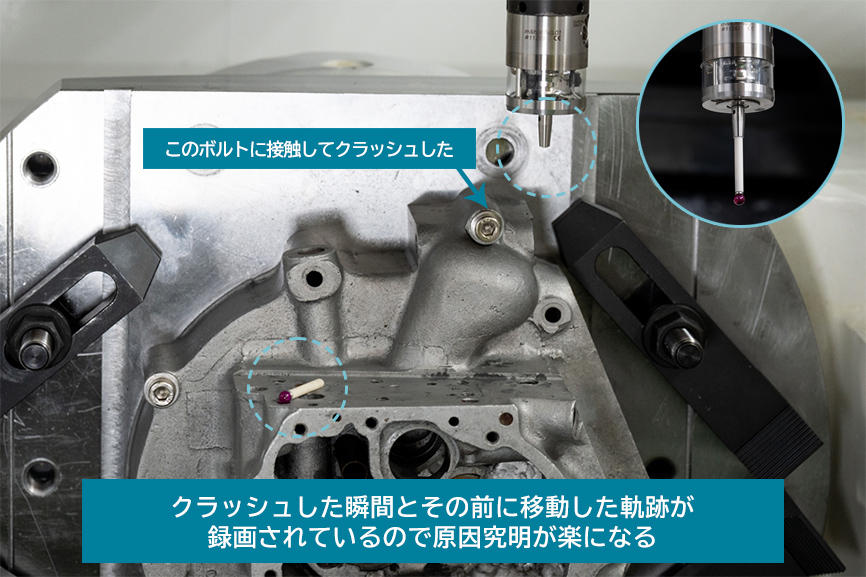
ほしい録画はアラームが起こった瞬間と起こるまでの過程です。
DIVINOは機械から発信されるアラーム信号に反応する仕組みになっておりますので、アラーム信号を受信すると即座に録画を停止します。
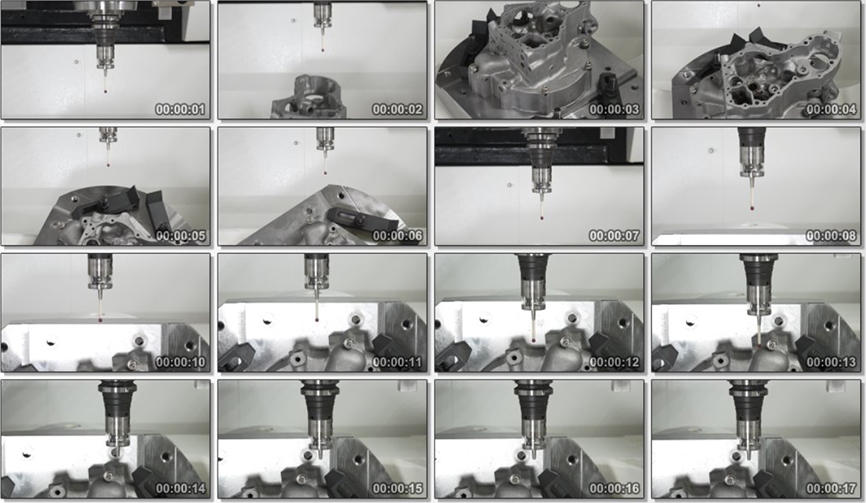
クラッシュの動画イメージ
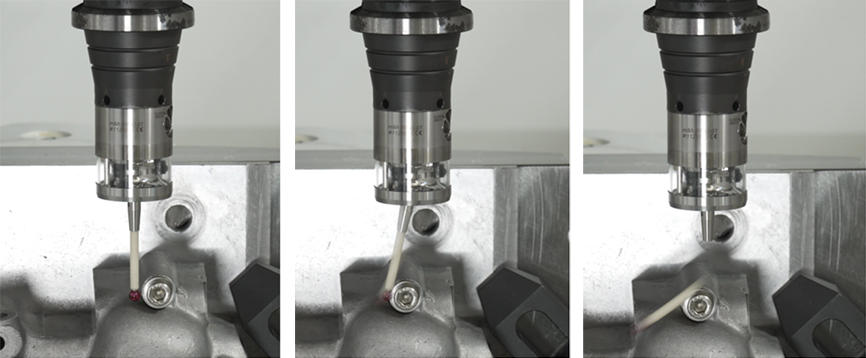
プログラムミスで早送り中にスタイラスがボルトに干渉し折損。
その後G31モードで測定対象物にアプローチするがタッチ信号が出ずアラームになる。
*上記画像はイメージ用でありDIVINOで取得した画像ではありません。
*上記画像はイメージ用でありDIVINOで取得した画像ではありません。
クラッシュした瞬間を再生し原因究明に生かすことができます。
*上記画像はイメージ用でありDIVINOで取得した画像ではありません。
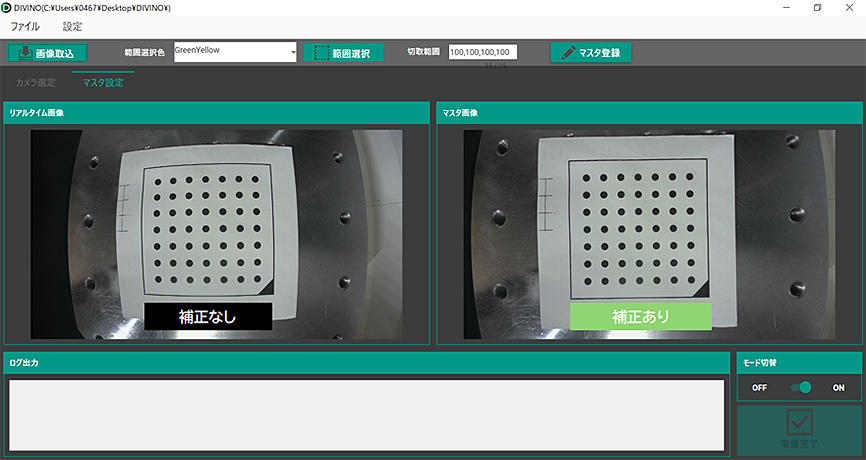
加工前の正常なワーク(機内に設置した状態)を撮影しマスター画像として保存します。
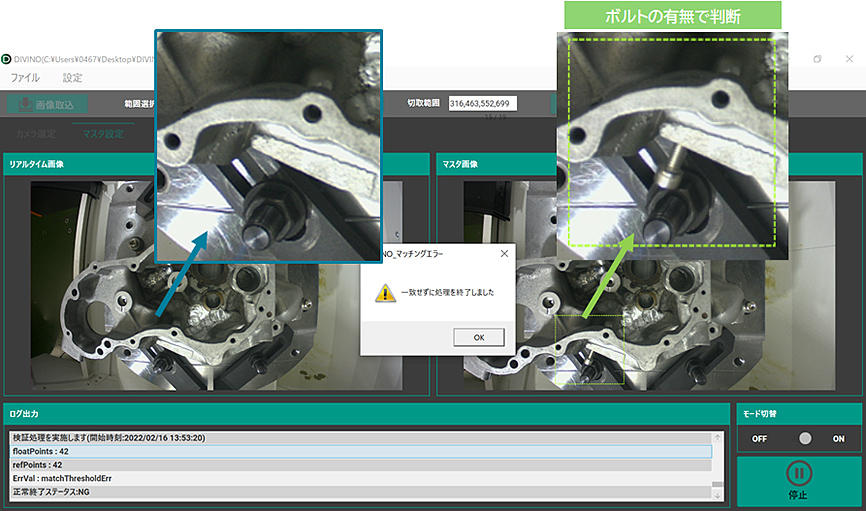
新しいワークを設置する度、加工前に実際のワークとマスター画像を比較し良否判定を実行します。
自動的に判定しますのでヒューマンエラーやロボットのミスも見つけることができます。
加工前に設置されたワークを画像判定し、マスターと一致すると加工を開始します。
以下の条件でアラームを出力します。
ワーク形状、機内照明等の諸条件で画像認識が変化しますので、ずれ量による判定結果の保証は致しかねますのであらかじめご了承願います。
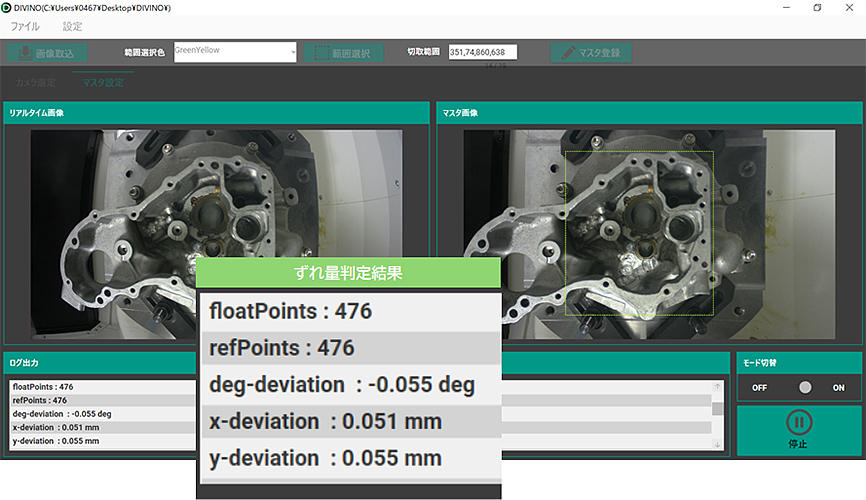
もちろんキャリブレーション実施し、レンズの歪みを補正し精度良く画像判断ができるようになっています。
注意
設置誤差判断はカメラをワーク平面に対して90度方向に設置しキャリブレーションを実施してください。
このカメラ姿勢以外はキャリブレーションはできません。